Fraunhofer-Institut für Integrierte Schaltungen IIS
Fraunhofer-Institut für Integrierte Schaltungen IIS
Projektbeschreibung
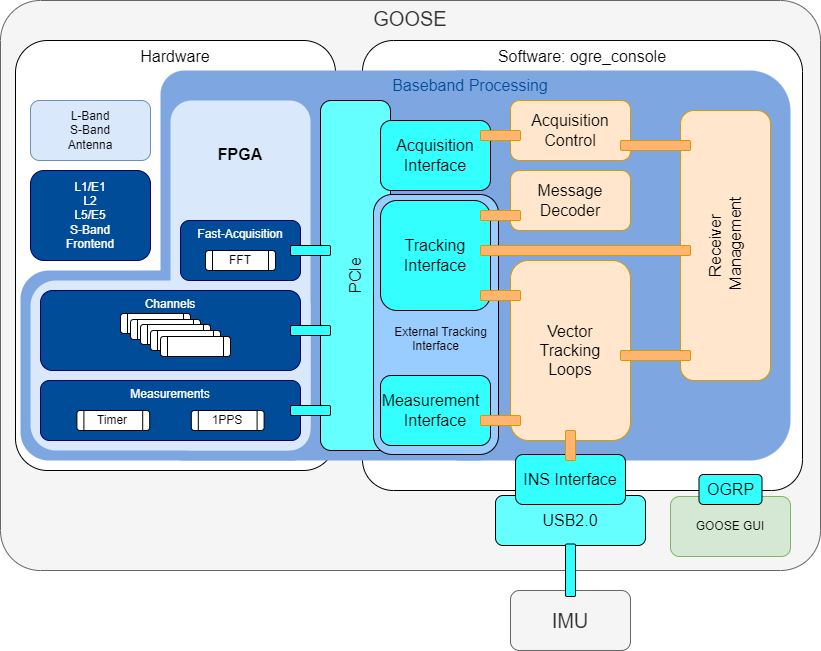
Bei herkömmlichen GNSS-Empfängern (Scalar Tracking Loop - STL) erfolgt das Tracking in mehreren unabhängigen Trackingschleifen, die Messungen wie (Pseudoentfernungen, Pseudoentfernungsraten, Träger-Doppler für einen Navigationsalgorithmus (Kalman-Filter) liefern. Dieser ist für die PVT-Lösung zuständig.
In Vector Tracking Loops (VTL) werden die beiden Aufgaben, d.h. die Signalverfolgung und die PVT-Schätzung kombiniert und ermöglichen so die Ausnutzung der inhärenten Kopplung zwischen der Dynamik in jedem Kanal und der Dynamik des Empfängers. In der Vektorarchitektur schließt der Navigationsfilterschätzer die Signalverfolgungsschleifen, indem er Korrekturen für die numerisch gesteuerten Code- und Trägeroszillatoren (NCO) erzeugt.
Letzteres ist insbesondere für Anwendungen im Automobilbereich hervorragend geeignet, da es Robustheit gegenüber Abschattungen und Mehrwegeausbreitung in städtischen Umgebungen gewährleistet.